ワクワク!宇宙開発へ民間初のチャレンジ HAKUTO(ハクト)

今回の見学の舞台は砂丘!
ここは日本三大砂丘の一つ、静岡県浜松市の中田島砂丘。夏にはウミガメが産卵のために上陸することのあるこちら。でも今日はウミガメを見に来たわけではありません。
視界は太陽と砂と広がる海。ここで行われるのは宇宙へのチャレンジ!
Googleが冠スポンサーになり、Xプライズ財団によって運営・開催されている民間初の月面無人探査を競うコンテストのGoogle Lunar X Prize(グーグル・ルナ・エックスプライズ)の審査がこの日本で一番月面に近い環境である中田島砂丘で行われます。

ミッションは宇宙から動画と静止画を送ること
月面に民生品のロボットを着陸させ、着陸地点から500メートル以上移動し、指定された高解像度の動画や静止画データを地球に送信するミッションを、チームハクトは日本を代表して参加。世界10ヵ国以上から参加する18チームと競います。

誰もが「ワクワクする」宇宙開発へ
月面着陸や宇宙開発というとアポロのような国家的なプロジェクトを皆さん想像するかもしれません。でも、このミッションのポイントは「民間」であること。チームハクトは既存の宇宙開発の枠を超えて挑戦することでより「ワクワクする」イノベーションを起こし、宇宙開発に限らず夢に向かって行動を起こすキッカケを生み出すことも目的にしています。

チームハクトのシンボルマークはうさぎさんです。
実はこの日は、名古屋地方に新幹線が一時ストップするほど雪が降った寒波襲来の次の日。
チームハクトのメンバーもメディアのみなさんも防寒対策をしてきたものの、遮るもののない砂丘、冬の風が襲う中、鼻水すすりながらがんばっています。


東北大学大学院航空宇宙工学専攻の吉田和哉教授。
あの小惑星探査機「はやぶさ」のサンプル採集技術をはじめとして数々の宇宙機の開発に携わったのだそう。すごい先生なんです!
いよいよフィールド走行試験が始まります。
じゃじゃーん!

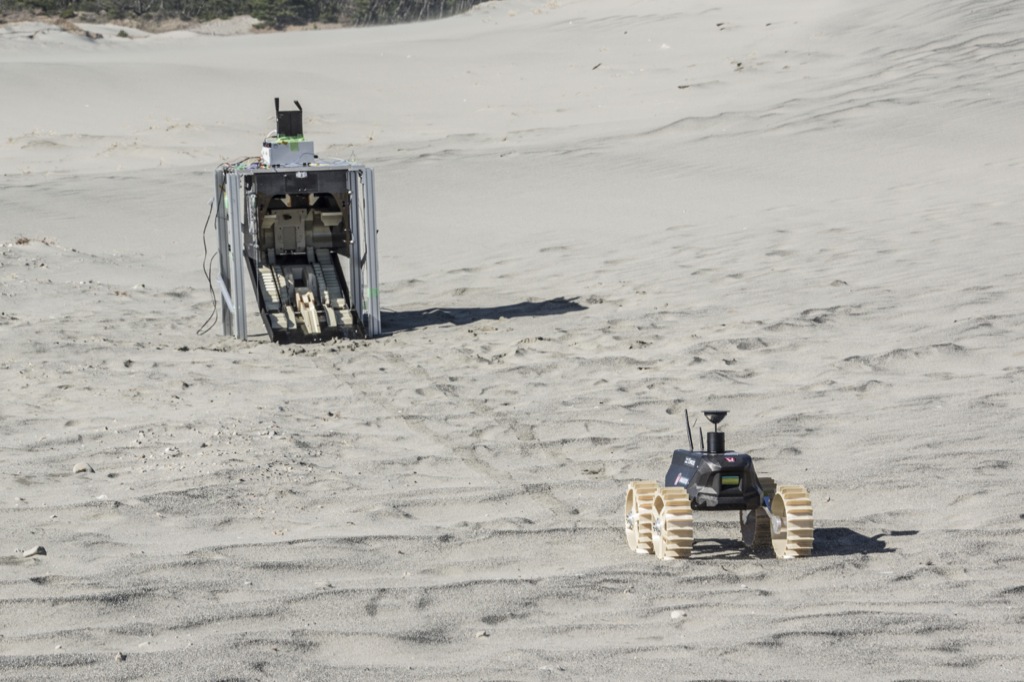
これが夢を乗っけて月にいくローバー(走行するマシンのこと)です。
大きくて車輪の4つある「Moonraker」(ムーンレイカー)と車輪が2つのTetris(テトリス)。
砂丘を月面に見立て、ムーンレイカーが走行・牽引、テトリスは縦孔探査と担当が分かれています。
日本技術の得意技「小型化」思想が取り入れられています。
ミッションに必要な最小限の機能を搭載し、軽量・超小型なローバーになっていて、宇宙への打ち上げ費用は重量に比例して上がるのでコストの面でも小型軽量化はとてもたいせつ。
スペックはこのようになっています。
Moonraker(ムーンレイカー)
w480×d600×h540mm 8kg←小包サイズくらい。
Tetris(テトリス)
w270×d540×h210mm 2kg

Moonrakerボディに360度カメラ、レーザーレンジファインダー(前方の障害を感知する)を搭載しています。
そして、コストを抑えるために民生品の部品を多く使用しています。
Japan Madeにとことんこだわってる。

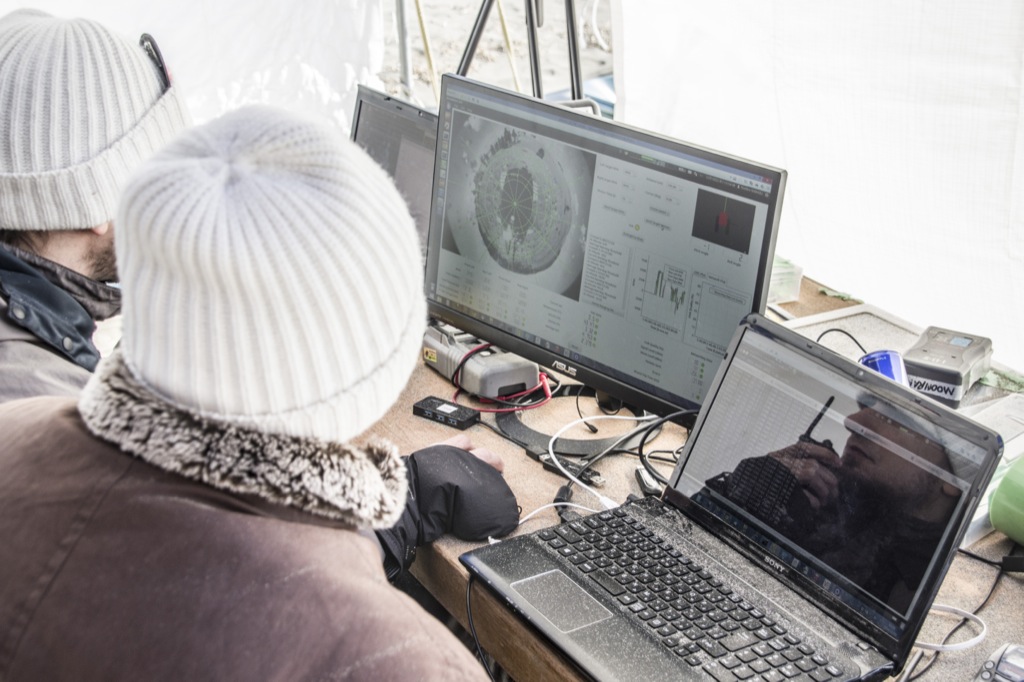
月面上のローバーを直接見ることはできないので、わざと指令室はテントで囲い、目視できない環境で遠隔操作をします。
今回は38万キロ離れた月面での走行が前提となるため、わざと電波や通信速度を遅延させ、できるだけ実際の条件に近づけた試験環境で行われます。WiFiも使用NG!
今回の走行試験のテスト内容は大きく6つ。
- 月面着陸からローバーが展開し、動き出す
- 100メートルの走行
- 小さな障害物を乗り越える
- 大きな障害物を回避する
- 2輌連結のローバーで牽引する(デュアルローバーシステム)
- 縦孔探査
これらの課題に順番に挑戦します。

真ん中の四角い箱がEnvelope。これが着地地点までローバーたちを格納し、解き放ちます。
風の音だけがする砂丘の中で開くのをずっと待っていると、まるで本当に月面にいるような気持になるから不思議です。
フタが開いて...Moonrakerが生まれた!

無事!月面(砂丘です)に到達。ゆっくりと歩みを始めます。
走行の時速は約100メートル。赤ちゃんのハイハイくらいのスピードです。
着実に歩むその姿はまさしく僕らの夢を乗せたベイビー。「がんばれ!」と感情移入して言いたくなるほど。



坂も難なくクリア、月にはデコボコたくさんありそうだしなー。
あ、大きな障害(カラーコーン)

これはいくらなんでも越えられない。どうするんだろう。
旋回!

あ、避けた。ですよね。(乗り越えるのかと思った)無事クリア。
あれ??どうしたの?
Moonraker!どうしちゃったの。なかなか進まない。草がはさまった!

オペレーションセンターも緊迫した空気。

「ウォオオオオ~」
月には草はありませんが、障害を何とかクリア。
後退や前進をなんどか繰り返して、進み始めることができた。
後のインタビューで吉田教授は「車輪の溝がリスクとして発見できた、溝の隙間に障害物が挟まると駆動に影響がある」とお話していました。
「月には草がないもんねー」と僕ならそのままにしてしまいそうですが、この小さな発見も見逃さない姿勢に頭が下がります。

Tetris登場!
Tetrisを牽引する2輌連結は成功。
テトリス側から糸をだし、だんだんMoonrakerから離れていきます。
いよいよ縦孔へ

月面に存在する縦穴に見立てた崖(たぶん20度くらい)をTetrisが下りていきます。
ここからはハクト独自のミッションの縦孔探査のための試験です。
糸が出ます糸がでます。

宇宙のサイエンスを探り、イノベーションを起こす!
Google Lunar X Prizeでは、月面で500メートル走行し、動画と静止画を送るのがミッション。
Moonrakerだけでも、その課題はクリアできるので、縦孔は必ず必要なものではありません。むしろ、審査の合格だけが目的だと余計なリスクといえます。
しかし、ハクトは2輌連結(デュアルローバー)によって月面に存在する縦孔を探査することを最終目的にしています。その理由は月の誕生を理解する鍵を見つけたり、将来人類が長期滞在する基地を設営する場所になるかもしれないから。

「我々の目的は賞金レースではない!」
今回のプロジェクトは一発で終わらせるつもりはなくて、審査対象ではない縦孔探査を含めたのも、宇宙のサイエンスを探るため。今回のプロジェクトをきっかけに、いろんな人が「月に行こう!」という気持ちになり、ビジネスの機会が拡大し、それに伴いプレイヤーが増えればコストも下がり、宇宙開発がより身近になるから。
とりあえずの目的は、このミッションをクリアすることなのですが、あえてハクト独自の縦孔探査を含んだのも実はこういう大いなる野望があったからなのでした。

今回のフィールド試験は以上で終了。縦孔の検証を含め、大成功といえる結果でした!

審査員のデービッドさん。
「今回の試験は上々だと思う。縦孔探査は審査対象ではないが楽しみだ」とコメント。
今回の審査結果は来年2015年の年明けに中間賞として発表されます。
実際に打ちあがるのは2015年秋の予定。
初めての民間!プロジェクトとして月に到達するプロジェクト。この砂浜が月面になるのはもうしばらく先になりそうですが、夢がでっかい分、待つのも楽しみです。

小さなサポーターも応援にきていました。彼が大人になるころには、宇宙旅行が日常になっているかもしれません。
ハクトのみなさん、おつかれさまでした!

そして、MoonrakerとTetrisに託して、みんなの夢は続きます。

動画もご覧くださいー
【詳細情報】
運営:株式会社ispace
住所:東京都港区麻布台3-1-6飯倉片町アネックス601
URL:http://team-hakuto.jp/
http://lunar.xprize.org/
(text:西村、photo:市岡、movie:加嶋)
関連するキーワード